
This is our attempt at building the world's cheapest large scale agricultural robot.
A week ago on Friday July 8, 2022 we wrote a series of articles on Chainbrake, the design that we had for our years long challenge of creating the world's cheapest agricultural robot. After several years of back and forth with our designs, we had thought that we had developed the best design in the chainbrake design. But a day of testing a prototype immediately revealed the problems that would be experienced with the proposed cable system. Much of what chainbrake really is now remains in our sketch books and in our heads. Although it is a good design and innovation that we hope will find use somewhere in the future, we have in the course of the week been able to come up with the design of a 2DoF Rail enabling infinite precise motion in 2 axes.
Our Inspiration
The inspiration for our project came from FarmBot. Farmbot seems to us a noble attempt to create a robot to help in agricultural work, not for the big industrial farms, but for the small scale kitchen gardeners. Without their work, we would probably never have begun our work. Theirs is the spark of light that we needed to see to begin what has now been about 5 years of work in RnD. It is true that this is probably a lot of time. But the design experience we have gained in the process has led to what we have chosen to call the Brian Mechanism.
The Problem Defined
Our primary problem and quarrel with Farmbot is in its cost and inscalability. Farmbot is so prohibitively priced for us who live in Africa. This can be seen from its buyer distribution map. After 6 years of production, and boasting of customers in over 90 countries, hardly any of these is from Africa and the other poor regions of the world.

The failure of Farmbot Max, the largest farmbot developed by FarmBot well illustrates its inscalability.
The table belows gives a comparison of the cost and size of the different farmbots available.
This leaves us with a robot we would like to have, but is too expensive for us, and which even if we would be able to afford, would still leave us disappointed that it can but work a very small area which can easily be worked by hand.
But seeing as this is not an article on the many disadvantages of Farmbot, especially to the poor African farmer, we proceed to consider:
A Brief Background
In the search for a design which would make an affordable and scalable robot, we have gone through several design iterations. Some of these are now relics in our sketchbooks, but considerable work has been done in some. These are some of the designs that we proposed:
A cable driven robot. This was dropped because of its complexity both in the mechanism and control. The name we gave for it was csybot (Circuits and Systems roBot). Mathematical models on github and an illustration on youtube are available.

Several other designs. Some have been lost while some are available on youtube and
on github With these designs we managed to come up with the design of a platform that can achieve continuous linear motion along one axis from the intermittent motion of two legs.But we had no way of raising up the legs to clear the ground when moving At this stage we were happy to rename our project to angel robotics. But since some people were already using that name, we decided to change to chainbrake in the next stage.
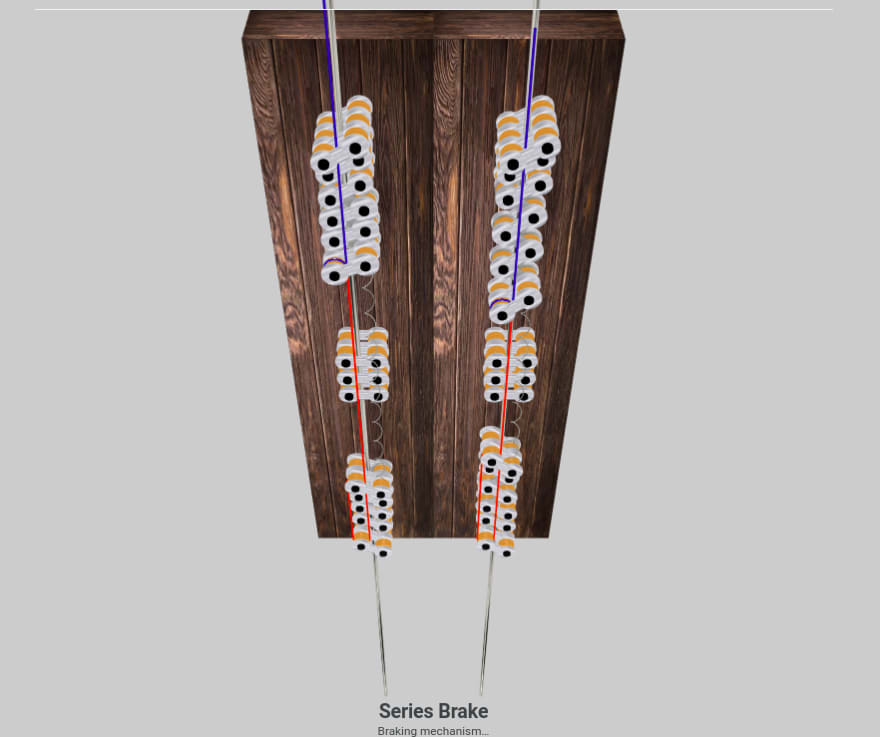
Chainbrake. This is yet another rope system. It is a low precision one, but capable of doing agricultural work. But it has been dropped because of the difficulty in tensioning rope systems. Chain brake simply means that it is a braking system for a rope system using an ordinary chain. When you insert a cable through a chain, then stretch the chain, the bearings of the chain grip on the cable so hard that it provides a way for stopping any movement of the chain.
We have also been able to do a little work, now on hold, on a farmbot simulator, which we discussed on the farmbot forum. See an illustration of it on youtube
We managed to create what is to us an interesting mechanism which combines the braking and actuation systems of the chain into a single one using two motors and a single chain. It lives in our sketchbooks. We do not want to be distracted by it now for the want of time. We hope it finds use somewhere in future.
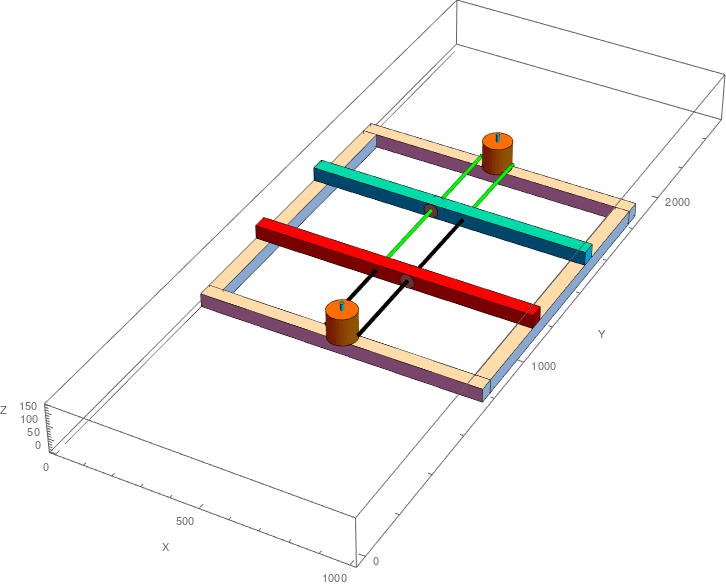
This is our problem: We need for our friends, neighbours and relatives a large scale agricultural robot that they can afford. If you already have developed such or know of one, we would be glad to hear from you so that we can immediately stop this our project. Except that ours is to be the cheapest. If there is already a cheap agricultural machine out there, we must reiterate until ours is the cheapest. But we believe that we already have a working design in: Brian Mechanism
As we have seen that our aim is to solve the dual problem of:
- Affordability
- Scalability
let us go on to see the steps through which we have been able to achieve this in designing for affordability and scalability

Top comments (0)