
Self Driving car with Computer Vision using OpenCV library
https://github.com/Jamshid-M/SmartRCCar
Step 1
Taking frame as input from RaspiCam

Step 2
Denoising frame with
GaussianBlur
OpenCV fucntion

Step 3
Finding edges with
Canny
edge detection, OpenCV function

Step 4
Finding yellow colors in the frame with
inRange
OpenCV function

Step 5
After applying step 3 and step 4 we use
bitwise_and
for two frames, this function returns intersection points of two frames.
Also applying dilate function will help you with finding lines by increasing pixels near our line pixels.
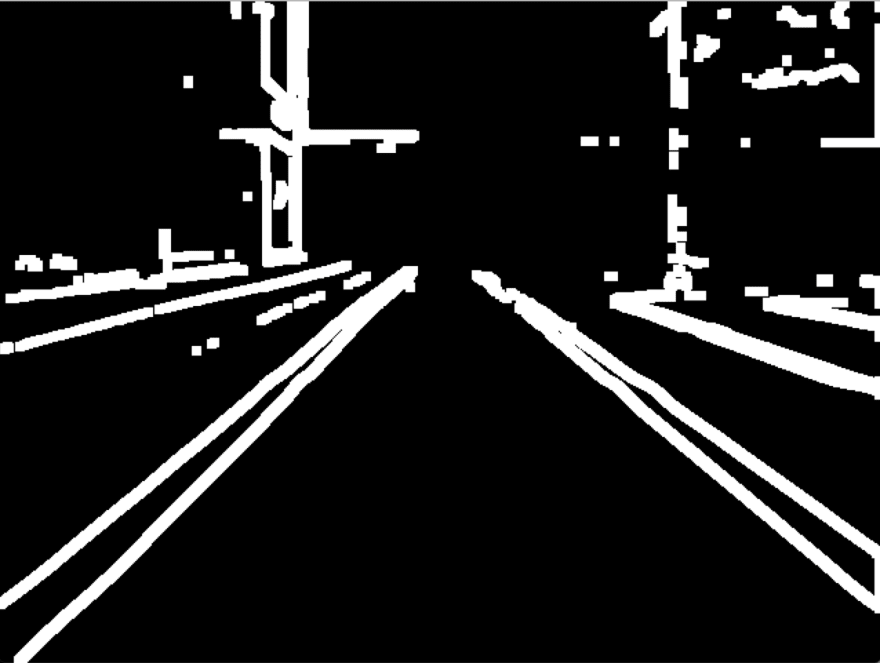
Step 6
Finally we have to mask our frame for avoiding unnecessary lines and pixels in our frame

After this step we just apply
HoughLines
function and find right and left lines appropriately.
With the help of right and left lines we will predict turn in predictTurn function
In this project I've made also traffic light recognition with color filtering and traffic sign recognition with Cascade classifier (xml)

Top comments (0)