Originally published on Medium
Note: Check out other posts on programming a social robot using Cycle.js too:
1. Programming a social robot using Cycle.js
2. Implementing a finite state machine in Cycle.js
In this post, I'll show you how to implement a reactive social robot program as a finite state machine. We'll continue from where we left off in the previous post Programming a social robot using Cycle.js--so check it out if you haven't already! If you are in a hurry, here is the demo and complete code of what we are building in this post.
Making existing "travel personality quiz" program more complex
Previously, we programmed a tablet-face robot to test your travel personality. Concretely, we implemented a tablet-face robot program that
- looks at a person when it sees one and
- asks travel personality quiz questions as shown in this flowchart
as a Cycle.js application. Here are the demo at Stackbliz and complete code in GitHub from the previous post.
IMPORTANT!! The main package we use in the demo and in this post, cycle-robot-drivers/run, only works on Chrome browsers (>= 65.0.3325.181) for now.
Now, what if we want the robot to
- look at a person only when the robot is waiting for a person's response,
- stop asking a question if the robot cannot see a person and resume asking the question if it sees a person again, and
- stop asking questions completely if a person abandons the robot, i.e., the robot does not see a person for more than 10 seconds.
How difficult would it be to update the existing program to have these additional behaviors? Try implementing the new behaviors on top of the travel personality quiz program.
What kind of challenges do you face?
From my experience, it was difficult to implement, or even just express the "stateful" behaviors in reactive programming. For example, to implement 1., I needed to know whether the robot is in the "waiting for a person's response" state but it wasn't clear how to represent such state in a scalable manner; I tried keeping all states in drivers (e.g., SpeechRecognitionAction emitting status events), as proxies (e.g., $lastQuestion in the previous code), or in higher-order streams, but none of them felt simple nor scalable. This was very concerning since many robot behaviors are expressed and implemented as stateful behaviors.
To address this problem, I propose using finite state machines to clearly express the desired robot behaviors. In the following, I first present a pattern for implementing a finite state machine in a reactive programming framework (Cycle.js) without scarifying maintainability. Then I demonstrate a use case of the FSM pattern via implementing the first additional behavior.
What is a finite state machine?
A finite state machine (FSM) is a computational model that can be used to represent and control execution flow. Due to their simplicity, FSMs have been frequently used by roboticists, UI developers and many others for a long time. An FSM we are using in this post is comprised of five parts:
- A set of states, e.g.,
'SAY_SENTENCE','WAIT_FOR_RESPONSE', etc. - A set of variables, e.g.,
currentSentence = 'Can you see yourself working online?' - A set of inputs: e.g.,
VALID_RESPONSE,INVALID_RESPONSE, etc. - A set of outputs: e.g.,
speechSynthesisAction = 'Can you see yourself working online?' - A transition function that takes a state, variable, and input and returns a state, variable, and output.
If you are familiar with FSMs, the FSM we are using is a mealy machine extended with "variables".
Like a mealy machine, it has the following constraints:
- the state set is a finite set
- the FSM can only be in one state at a time in the state set
- the transition function is deterministic; given a state, variable, and input the function always returns the same new state, new variable, and new output.
Representing the "travel personality quiz" program as an FSM
We'll start from representing the "travel personality test" program we implemented in the previous post as an FSM:

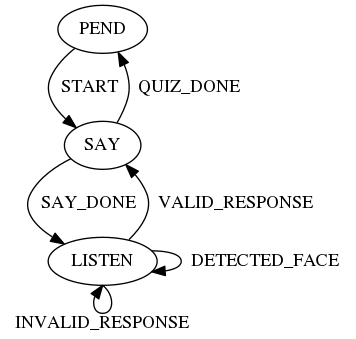
Here we have three states, PEND, SAY, LISTEN, and five input types, START, SAY_DONE, VALID_RESPONSE, INVALID_RESPONSE, and DETECTED_FACE. We omitted variables associated with each state and outputs associated with each transition for visual clarity.
Notice that we use verbs as state names (as a popular robotics FSM library SMACH does). This is because we define the states based on distinct actions each state is performing, where the distinct actions are triggered by outputs emitted from transitions. You may have wondered why we did not create each state in the travel quiz flowchart as an individual state, e.g., ASK_CAREER_QUESTION, ASK_WORKING_ABROAD_QUESTION, ASK_FAMILY_QUESTION, etc. This is because representing the states that behave the same except the sentence the robot says with a single SAY state with a variable currentSentence (not shown in the diagram) yields the simpler, more maintainable FSM.
The inputs can be considered as the events that could occur in each state and are originated from actions, e.g., SAY_DONE, sensors, e.g., DETECTED_FACE, or external systems, e.g. START. We represent an input as a type-value pair. For example, the VALID_RESPONSE type input is paired with a value "yes" or "no", which is used to determine the transition between LISTEN to SAY (input values are not shown in the graph).
Now, let's update the FSM to express the first additional behavior mentioned above: looking at a person only when the robot is waiting for a person's response.
All we did here is remove the two self-loop transitions from the PEND and SAY states to stop the robot from looking at a person while the FSM is in those states.
Implementing the "travel personality test" FSM using Cycle.js
Let's now implement the "travel personality test" FSM we defined above using Cycle.js.
First, we'll try to define the FSM in javascript as follows:
const State = {
PEND: 'PEND',
SAY: 'SAY', //_SENTENCE
LISTEN: 'LISTEN', //_FOR_RESPONSE
};
const InputType = {
START: `START`,
SAY_DONE: `SAY_DONE`,
// QUIZ_DONE: is not an input type but a transition
VALID_RESPONSE: `VALID_RESPONSE`,
INVALID_RESPONSE: `INVALID_RESPONSE`,
DETECTED_FACE: `DETECTED_FACE`,
};
function transition(state, variables, input) { // a dummy transition function
const newState = state;
const newVariables = variables;
const newOutputs = null;
return {
state: newState,
variables: newVariables,
outputs: newOutputs,
};
}
/**
* // Example state, variables, input, and outputs
* const state = State.PEND;
* const variables = {
* sentence: 'You are a vacationer!',
* };
* const input = {
* type: InputType.START,
* value: null,
* };
* const outputs = {
* SpeechSynthesisAction: {
* goal: 'You are a vacationer!'
* },
* SpeechRecognitionAction: {
* goal: {}
* },
* TabletFace: {
* goal: {
* type: 'SET_STATE',
* value: {
* leftEye: {x: 0.5, y: 0.5},
* rightEye: {x: 0.5, y: 0.5},
* },
* }},
* },
* }
*/
Here we define the set of states State, the set of input types InputType, and the transition function transition. The sets for the variables and outputs of the FSM are not explicitly defined, but I provided example values that the variables and outputs can take in the comment.
Setting up FSM in Cycle.js
We'll now setup the FSM as a Cycle.js application. You can fork the Stackblitz demo code and start coding or set up a Cycle.js application.
For the latter, create a folder:
mkdir my-second-robot-program
cd my-second-robot-program
Download package.json, .babelrc, index.html, create an empty index.js file in the folder, and run npm install to install the required npm packages. After installing, you can run npm start to build and start the web application--that does nothing at this point.
Now add the following code in index.js:
import xs from 'xstream';
import {runRobotProgram} from '@cycle-robot-drivers/run';
const State = {
// ...
const InputType = {
// ...
function transition(state, variables, input) { // a dummy transition function
// ...
function input( // a dummy input function
start$,
speechRecognitionActionResult$,
speechSynthesisActionResult$,
poses$,
) {
return xs.never();
}
function output(machine$) { // a dummy output function
return {
SpeechSynthesisAction: xs.never(),
SpeechRecognitionAction: xs.never(),
TabletFace: xs.never(),
};
}
function main(sources) {
const input$ = input(
sources.TabletFace.load,
sources.SpeechSynthesisAction.result,
sources.SpeechRecognitionAction.result,
sources.PoseDetection.poses,
);
const defaultMachine = {
state: State.PEND,
variables: {
sentence: null,
},
outputs: null,
};
const machine$ = input$.fold((machine, input) => transition(
machine.state, machine.variables, input
), defaultMachine);
const sinks = output(machine$);
return sinks;
}
runRobotProgram(main);
If you run the application, it should load a robot face that still does nothing on your browser.
The most important thing to notice here is that we divide the main function into three functions; input, transition, and output. The input function takes incoming streams in sources and returns a stream that emits the FSM's input values. We then use the fold xstream operator on the returned stream ($input) to trigger the FSM's transition function. Note that the fold operator is like Array.prototype.reduce for streams; it takes
- an accumulator function that takes an emitted value (e.g., an FSM input value,
input) and a previous output of the accumulator function (e.g., the latest FSM status,machine) or a seed value and - an initial output of the accumulator function (e.g., the initial FSM status,
defaultMachine).
Finally, the output function takes the stream that emits FSM status ($machine) and returns outgoing streams.
Input, transition, and output
Let's implement the three functions.
First, update the dummy input function to:
// ...
const Response = {
YES: 'yes',
NO: 'no',
}
function input(
start$,
speechRecognitionActionResult$,
speechSynthesisActionResult$,
poses$,
) {
return xs.merge(
start$.mapTo({type: InputType.START}),
speechRecognitionActionResult$
.filter(result =>
result.status.status === 'SUCCEEDED'
&& (result.result === Response.YES || result.result === Response.NO)
).map(result => ({
type: InputType.VALID_RESPONSE,
value: result.result,
})),
speechSynthesisActionResult$
.filter(result => result.status.status === 'SUCCEEDED')
.mapTo({type: InputType.SAY_DONE}),
speechRecognitionActionResult$
.filter(result =>
result.status.status !== 'SUCCEEDED'
|| (result.result !== Response.YES && result.result !== Response.NO)
).mapTo({type: InputType.INVALID_RESPONSE}),
poses$
.filter(poses =>
poses.length === 1
&& poses[0].keypoints.filter(kpt => kpt.part === 'nose').length === 1
).map(poses => {
const nose = poses[0].keypoints.filter(kpt => kpt.part === 'nose')[0];
return {
type: InputType.DETECTED_FACE,
value: {
x: nose.position.x / 640, // max value of position.x is 640
y: nose.position.y / 480, // max value of position.y is 480
},
};
}),
);
}
// ...
Try testing whether the input function is behaving properly. For example, you can attach the addListener xstream operator to the returned $input stream and return some outgoing streams from the output function.
Like this:
// ...
import delay from 'xstream/extra/delay'
function output(machine$) {
return {
SpeechSynthesisAction: xs.of('Hello world!').compose(delay(1000)),
SpeechRecognitionAction: xs.of({}).compose(delay(1000)),
TabletFace: xs.never(),
};
}
function main(sources) {
const input$ = input(
sources.TabletFace.load,
sources.SpeechSynthesisAction.result,
sources.SpeechRecognitionAction.result,
sources.PoseDetection.poses,
);
input$.addListener({next: value => console.log('input', value)})
// ...
Do you see the expected outputs on your browser console? You should see many inputs with the DETECTED_FACE type if the robot is detecting a person.
Let's now remove the dummy transition function and create a new one:
// ...
const State = {
// ...
const InputType = {
// ...
// // Remove the dummy transition function
// function transition(state, variables, input) { // a dummy transition function
// ...
const Response = {
// ...
function input(
// ...
function createTransition() {
const Sentence = {
CAREER: 'Is it important that you reach your full career potential?',
ONLINE: 'Can you see yourself working online?',
FAMILY: 'Do you have to be near my family/friends/pets?',
TRIPS: 'Do you think short trips are awesome?',
HOME: 'Do you want to have a home and nice things?',
ROUTINE: 'Do you think a routine gives your life structure?',
JOB: 'Do you need a secure job and a stable income?',
VACATIONER: 'You are a vacationer!',
EXPAT: 'You are an expat!',
NOMAD: 'You are a nomad!',
};
const flowchart = {
[Sentence.CAREER]: {
[Response.YES]: Sentence.ONLINE,
[Response.NO]: Sentence.FAMILY,
},
[Sentence.ONLINE]: {
[Response.YES]: Sentence.NOMAD,
[Response.NO]: Sentence.VACATIONER,
},
[Sentence.FAMILY]: {
[Response.YES]: Sentence.VACATIONER,
[Response.NO]: Sentence.TRIPS,
},
[Sentence.TRIPS]: {
[Response.YES]: Sentence.VACATIONER,
[Response.NO]: Sentence.HOME,
},
[Sentence.HOME]: {
[Response.YES]: Sentence.EXPAT,
[Response.NO]: Sentence.ROUTINE,
},
[Sentence.ROUTINE]: {
[Response.YES]: Sentence.EXPAT,
[Response.NO]: Sentence.JOB,
},
[Sentence.JOB]: {
[Response.YES]: Sentence.ONLINE,
[Response.NO]: Sentence.NOMAD,
},
};
// this transitionTable is a dictionary of dictionaries and returns a function
// that takes previous "variables" and "inputValue" and returns a current
// FSM status; {state, variable, outputs}
// this transitionTable is a dictionary of dictionaries and returns a function
// that takes previous "variables" and "inputValue" and returns a current
// FSM status; {state, variable, outputs}
const transitionTable = {
[State.PEND]: {
[InputType.START]: (prevVariables, prevInputValue) => ({
state: State.SAY,
variables: {sentence: Sentence.CAREER},
outputs: {SpeechSynthesisAction: {goal: Sentence.CAREER}},
}),
},
[State.SAY]: {
[InputType.SAY_DONE]: (prevVariables, prevInputValue) => (
prevVariables.sentence !== Sentence.VACATIONER
&& prevVariables.sentence !== Sentence.EXPAT
&& prevVariables.sentence !== Sentence.NOMAD
) ? { // SAY_DONE
state: State.LISTEN,
variables: prevVariables,
outputs: {SpeechRecognitionAction: {goal: {}}},
} : { // QUIZ_DONE
state: State.PEND,
variables: prevVariables,
outputs: {done: true},
},
},
[State.LISTEN]: {
[InputType.VALID_RESPONSE]: (prevVariables, prevInputValue) => ({
state: State.SAY,
variables: {sentence: flowchart[prevVariables.sentence][prevInputValue]},
outputs: {
SpeechSynthesisAction: {
goal: flowchart[prevVariables.sentence][prevInputValue],
},
TabletFace: {goal: {
type: 'SET_STATE',
value: {
leftEye: {x: 0.5, y: 0.5},
rightEye: {x: 0.5, y: 0.5},
},
}},
},
}),
[InputType.INVALID_RESPONSE]: (prevVariables, prevInputValue) => ({
state: State.LISTEN,
variables: prevVariables,
outputs: {SpeechRecognitionAction: {goal: {}}},
}),
[InputType.DETECTED_FACE]: (prevVariables, prevInputValue) => ({
state: State.LISTEN,
variables: prevVariables,
outputs: {
TabletFace: {goal: {
type: 'SET_STATE',
value: {
leftEye: prevInputValue,
rightEye: prevInputValue,
},
}},
}
}),
},
};
return function(prevState, prevVariables, prevInput) {
console.log(prevState, prevVariables, prevInput);
// excuse me for abusing ternary
return !transitionTable[prevState]
? {state: prevState, variables: prevVariables, outputs: null}
: !transitionTable[prevState][prevInput.type]
? {state: prevState, variables: prevVariables, outputs: null}
: transitionTable[prevState][prevInput.type](prevVariables, prevInput.value);
}
}
const transition = createTransition();
function output(machine$) { // a dummy output function
// ...
Here we define and return the FSM's transition function inside the createTransition function.
Finally update the dummy output function to:
// ...
const transition = createTransition();
function output(machine$) {
const outputs$ = machine$
.filter(machine => !!machine.outputs)
.map(machine => machine.outputs);
return {
SpeechSynthesisAction: outputs$
.filter(outputs => !!outputs.SpeechSynthesisAction)
.map(output => output.SpeechSynthesisAction.goal),
SpeechRecognitionAction: outputs$
.filter(outputs => !!outputs.SpeechRecognitionAction)
.map(output => output.SpeechRecognitionAction.goal),
TabletFace: outputs$
.filter(outputs => !!outputs.TabletFace)
.map(output => output.TabletFace.goal),
};
}
function main(sources) {
// ...
Try running the application and test whether it behaves as we defined in the FSM.
You just implemented a social robot program as an FSM!
Relation to the Model-View-Intent pattern
The FSM pattern is an application of the Model-View-Intent (MVI) pattern, an adaptation of Model-View-Controller in reactive programming, where "intent" is input, "model" is FSM status, and "view" is output. In addition to the MVI pattern, the FSM pattern additionally requires a specific structure for the "model"/FSM status and the "update"/transition.
Updating the "travel personality quiz" FSM
The true power of the FSM pattern is its maintainability. The crux of the FSM pattern is dividing the main function into the three functions that have separate concerns:
- the
inputfunction that focuses on turning incoming streams into "input" that the FSM can work with and - the
transitionfunction implements the FSM's transition function. - the
outputfunction that maps the outputs returned fromtransitioninto the outgoing streams (sinksin Cycle.js) to make side effects, e.g., trigger actions.
This separation allows programmers to only update the portion of code in the two functions when they need to make the program more complex.
For example, if we were to implement the rest of additional behaviors mentioned in the Making "travel personality quiz" program more complex section, we'll need to first update the FSM to reflect the new desired behavior, e.g.:

and update the input and transition functions accordingly. Checkout the complete code to see how I updated the input and transition functions to implement the remaining additional behaviors.
The biggest challenge for using FSM is defining FSM. If you are using the FSM pattern and having problems with it, double check the current definition of your state machine. For example, look for the redundant states or input types that make updating the transition function cumbersome (merge them into one state with variables), or look for state or input type that is not being used as intended for (add new necessary states or input types). Another point to check is, making sure your FSM is taking reactive programming approach, e.g., make sure the three functions (input, transition, output) are as pure as possible. Defining effective FSM is art, but I believe using FSMs in reactive programming greatly helps the programmers to better organize their programs.
Thank you for reading! I hope I got you interested in using FSMs in Cycle.js. Let me know if something isn’t clear, and I’d be happy to chat.
My name is Mike Chung. I'm a graduate student interested in the field of human-robot interaction and machine learning. You can reach me on Twitter and on GitHub.

Top comments (0)